Community articles — Math
Recent
Solving the physics problems you are presented with in an introductory course become easier if each time you sit down to solve a problem, you follow a generalized problem-solving strategy that includes sketching pictures.

Template for the class PL 7.
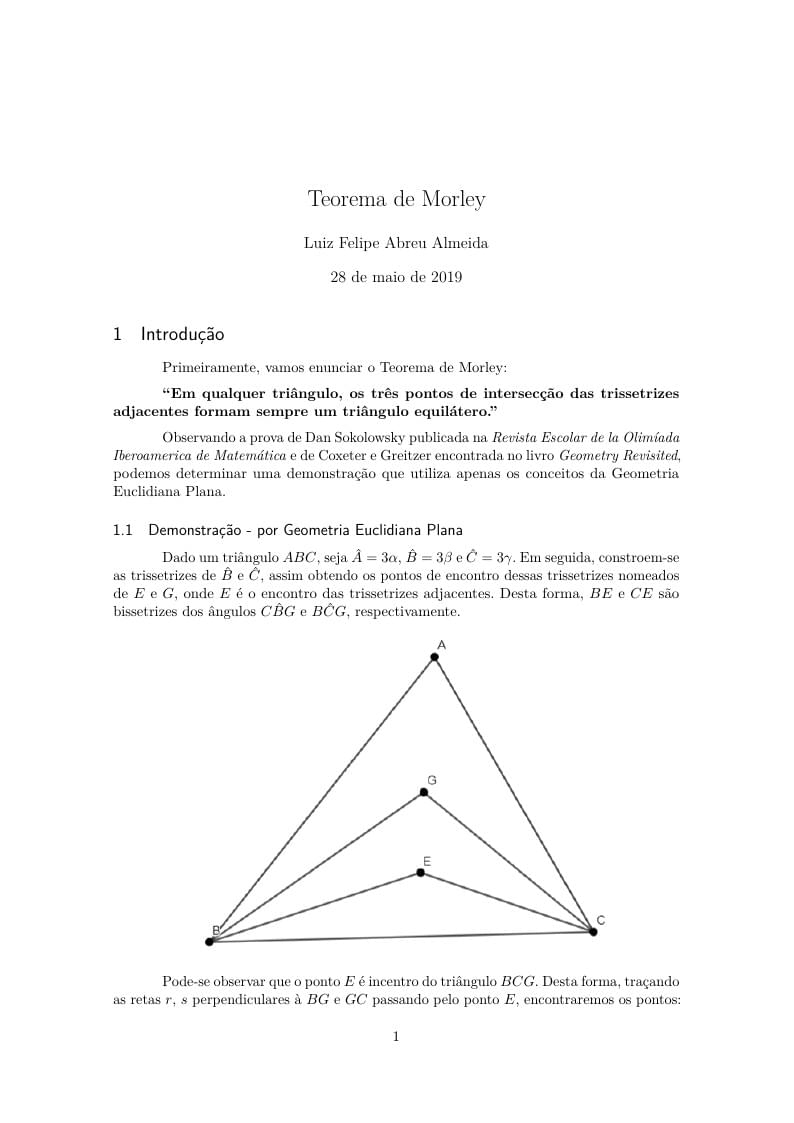
Demonstração do teorema de Morley

This study is focused on lives of twelve women who prepared their doctorates in mathematics at the Faculty of Philosophy of the German University in Prague in the years 1882–1945, respectively at the Faculty of Science of the Czech University in Prague in the years 1882–1920 and 1921–1945 (known as Charles University in Prague in the latter period). In the first part, a short description of the historical background about women's studies at the universities in the Czech lands and a statistical overview of all PhD degrees in mathematics awarded at both universities in Prague is given for a better understanding of the situation with women's doctoral procedures. In the second part, a description of the successful doctoral procedures in mathematics of three women at the German University in Prague and of eight women at Charles University in Prague, as well as one unsuccessful doctoral procedure, are presented.
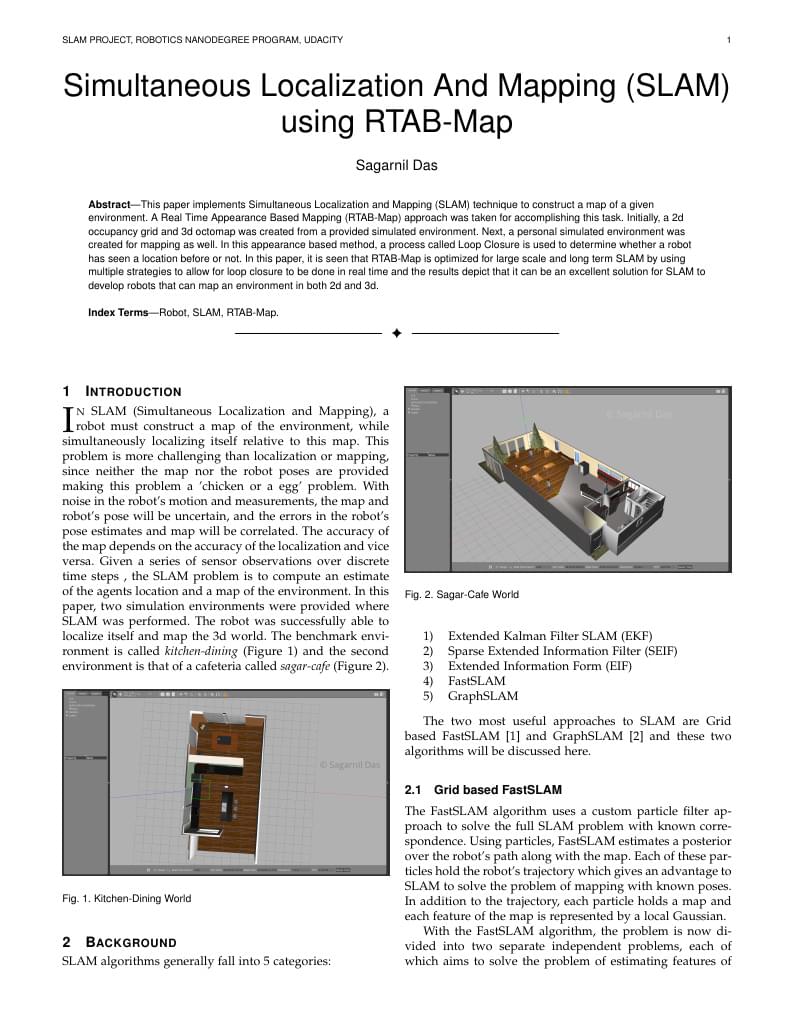
This paper implements Simultaneous Localization and Mapping (SLAM) technique to construct a map of a given environment. A Real Time Appearance Based Mapping (RTAB-Map) approach was taken for accomplishing this task. Initially, a 2d occupancy grid and 3d octomap was created from a provided simulated environment. Next, a personal simulated environment was created for mapping as well. In this appearance based method, a process called Loop Closure is used to determine whether a robot has seen a location before or not. In this paper, it is seen that RTAB-Map is optimized for large scale and long term SLAM by using multiple strategies to allow for loop closure to be done in real time and the results depict that it can be an excellent solution for SLAM to develop robots that can map an environment in both 2d and 3d.

linear algebra using matrix

Geometría Analítica
We study Logarithmically Spiral Trajectories and, in particular, we look for a solution to minimize the transit time of a Spacecraft propelled by a Solar Sail, while simultaneously minimizing the area of the Solar Sail, which would allow us to carry more payload on board. We start by analyzing the forces that act on the Spacecraft taking into account that its propellant is a Solar Sail; we use the studied forces to deduce the motion equations. We then solve this motion equation with a Runge-Kutta 4 method and transform the problem of minimizing time and area to a Non-linear Optimization problem. When solving the NLP we also try to minimize the relative final speed of th spacecraft with the destination planet in order to guarantee the possibility of a safe landing on its surface. The model improves when an angle parameter α (describing the angle formed by the Solar Sail with the colliding photons) is defined as a piecewise constant function and optimized whose values are optimized in every interval to minimize transit time and Area. Using the developed model to optimize the trajectory to be followed for sending from Earth to Mars a 2000kg-spacecraft propelled by a Solar Sail, subject to the condition that at trajectory start Mars and Earth were at their closest approach, and the Arrival Relative Velocity is less than 9km/s, give us a minimal transit time of 500days and a minimal area for the Solar Sail of 183158m2, meaning that the maximal payload would be 718kg. Compared with different number of partitions of α, the optimum stays stable. This gives a solid optimal trajectory and a great result for the numerical method used. Actually, waiting until the best moment to throw the Spacecraft, id est, Mars is at 1.14 radians respectively to Earth initial position, the minimal sail area 145950 m2 and, therefore, ables to transport until 978 kg of payload with the same transit time. In addition and to conclude we tried the model to optimize the inverse trajectory.
Beamer presentation with bibunits features, and header formatting alternatives.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.