LaTeX templates and examples — Reports
Write up experiments and research with LaTeX templates for project and lab reports—including layout guidelines to help guide you through the writing process.
Recent
deep learning 本文总结目前学习的深度学习算法,主要用于 text classification 方向
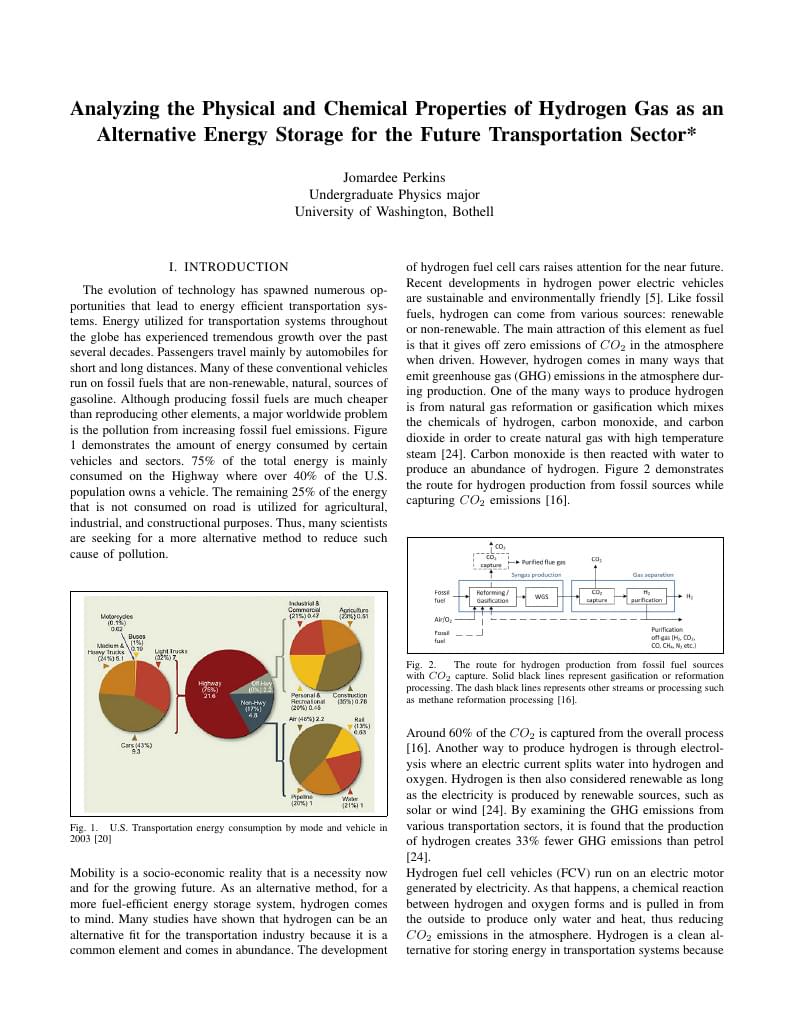
The future of alternative energy storage for vehicles is bright because the use of hydrogen in the economy provides various solutions to environmental situations. Hydrogen is as flexible as electricity in that it can be produced in both renewable and non-renewable sources of energy. However, the literature written focuses on the conditions that are needed to be accounted for when it comes to switching to hydrogen as an alternative energy storage using statistical analysis. By taking an economic and environmental investigation, hydrogen has the best air pollution emissions in comparison to conventional, hybrid and electric vehicles. It is also found that hydrogen fuel cell vehicles are simpler in design which accounts for its weight that is much lighter than most vehicles. Ergo, hydrogen is the preferred fuel for fuel cell vehicles because of efficiency that can increase the potential for a sustainable climate.

Optical fiber technology and its applications

Pequeño acelerador de "partículas" utilizando cargas electostáticas

Sleeper's Attendance is a paper describing a method to be used on a University's attendance system that can essentially bypass it and allow the attacker to register for all their classes. The paper also briefly describes about QR attendance systems in general and some ways to improve it.
This is an unofficial version.
The template provided at https://github.com/novoid/LaTeX-KOMA-template with some minor corrections/updates. This is a generic template for LaTeX documents using KOMA Script classes which are pretty common at least in German spoken countries.

This is a review of journals in the area of using Artificial Intelligence for Intrusion Detection and Prevention Systems. The journals have discussed the milestones that have been achieved in the area of network security particularly intrusion detection. They has also highlighted several Machine Learning algorithms that can be applied in this area to improve the IDS systems.
This is a simple template that i used for my projects at the university. The most of it is in italian so you have to change languages set if you want to use it.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.