overleaf template galleryCommunity articles — Recent
Papers, presentations, reports and more, written in LaTeX and published by our community.
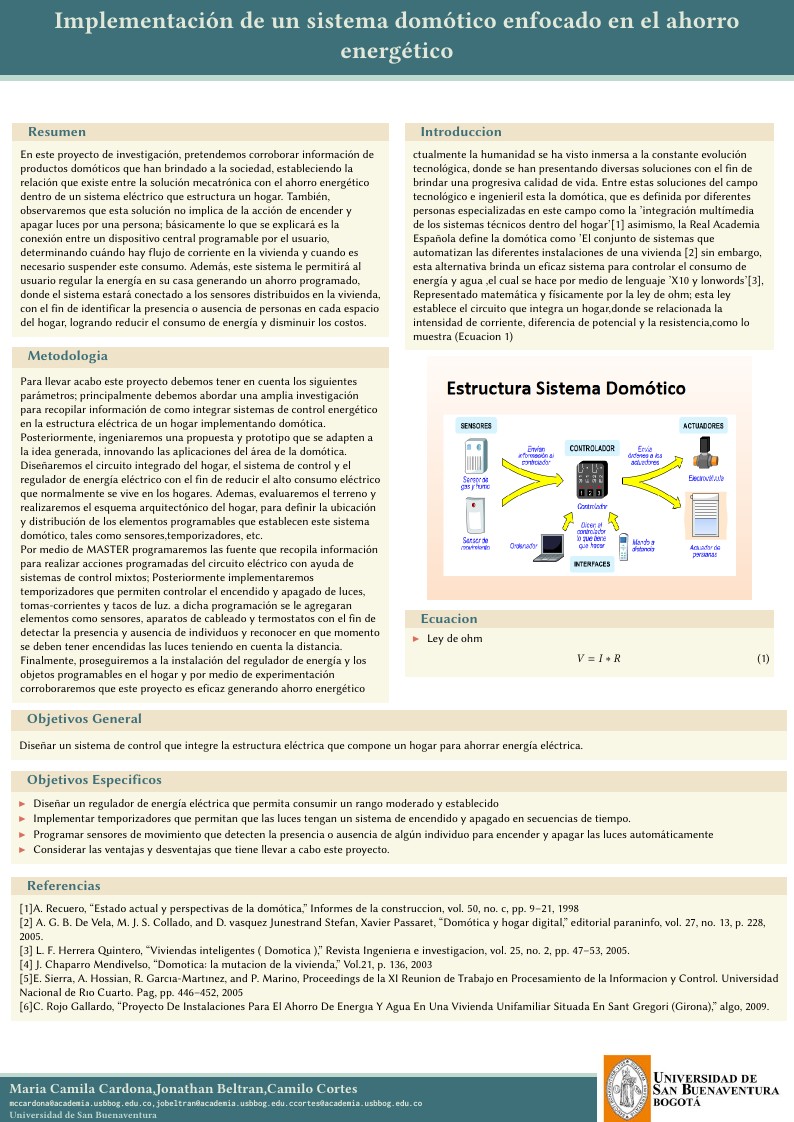
Entre las ventajas que tiene la domótica esta la protección del hogar e integración familiar, añadir valor a la vivienda, mejorar la calidad de vida (acondicionar el clima, aislamiento de equipos, encendido y apagado de luces, regular la energía y automatizar los distintos sistemas) de las personas que viven en ella y en este caso la que nos identifica es el ahorro energético que 'añade inteligencia a las casas
A presentation on Virgil's works

Vibration control is crucially important in ensuring a smooth ride for vehicle passengers. This study sought to design a suspension system for a car such that its mode of vibration would be predominantly bouncing at lower speeds, and primarily pitching at higher speeds. Our study used analytical and numerical methods to choose appropriate springs and dampers for the front and rear suspension. After an initial miscalculation, we succeeded in arriving at appropriate shocks for the vehicle with the desired modes of vibration at the specified frequencies. We then assessed the maximum bouncing and pitching that the vehicle would experience under a specific set of conditions: travel at 40 km/hr over broken, rough terrain. Our testing showed moderate success in our suspension design. We successfully damped the force being transmitted to both the front and rear quarter car somewhat, while ensuring that the modes of vibration fell into the desired shapes at the desired frequency ranges.
This paper takes a systematization of knowledge approach on the domain of Secure Messaging. They propose an evaluation framework for their security, usability, and ease-of-adoption properties of the existing academic and end-user tools. Three key challenges identified are trust establishment, conversation security, and transport privacy.
Este trabajo presenta la aplicación de un conjunto de articulos con propias teorías de los robots manipuladores y el modelamiento de pinzas. Para ello el brazo humano se modela como un robot manipulador redundante. En particular se aplica el concepto de índices de desempeño para predecir posturas óptimas del brazo durante la realización de tareas. En el estudio se incluyen tanto estructuras estáticas, como tambien los analisis de estabilidad del brazo y los materiales para su respectiva realizacion. This work presents the application of a set of articles with the own theories of the manipulative robots and the modeling of tweezers. For this, the bearing is modeled as a redundant manipulator robot. In particular, the concept of performance indices is applied to predict the optimal postures of the task during the performance of tasks. The study includes both static structures, as well as safety management analyzes and materials for their respective realization.
BA04 presentation LaTeX Template Version 1.0 (14/12/14) This template has been downloaded from: http://www.LaTeXTemplates.com License: CC BY-NC-SA 3.0 (http://creativecommons.org/licenses/by-nc-sa/3.0/)
Calculating the value of Ck ∈ {1, ∞} class of smoothness real-valued function's derivative in point of R+ in radius of convergence of its Taylor polynomial (or series), applying an analog of Newton's binomial theorem and q-difference operator. (P,q)-power difference introduced in section 5. Additionally, by means of Newton's interpolation formula, the discrete analog of Taylor series, interpolation using q-difference and p,q-power difference is shown.
Daniyar Abesbek's CV. Created with the AltaCV template.
Choose how your presentation looks. For more themes, color themes and font themes, see: http://deic.uab.es/~iblanes/beamer_gallery/index_by_theme.html
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.